KIT Bimanual Actions Dataset
The Dataset in Numbers
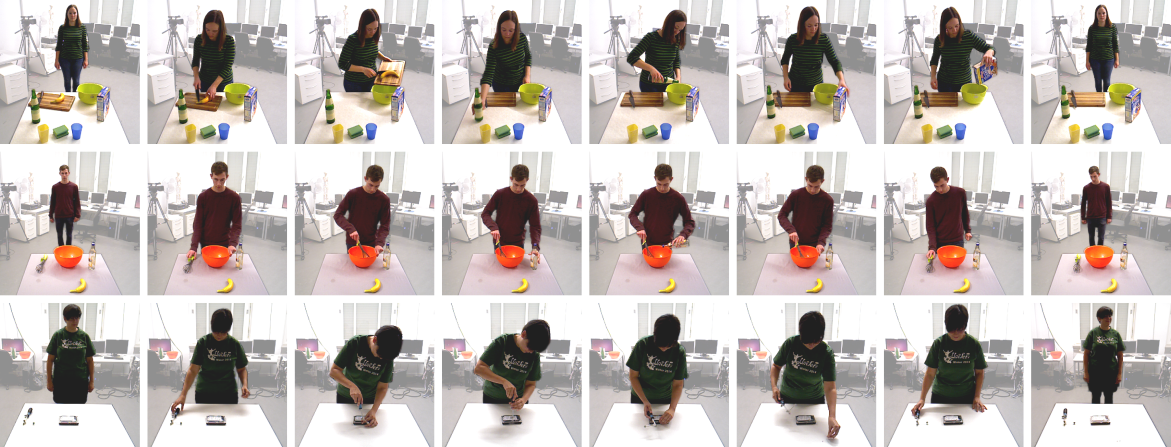
Some facts about the Bimanual Actions Dataset.
| Subjects | 6 subjects (3 female, 3 male; 5 right-handed, 1 left-handed) |
| Tasks | 9 tasks (5 in a kitchen context, 4 in a workshop context) |
| Recordings | 540 recordings in total (6 subjects performed 9 tasks with 10 repetitions) |
| Playtime | 2 hours and 18 minutes, or 221 000 RGB-D image frames |
| Quality | 640 px × 480 px image resolution; 30 fps (83 recordings are at 15 fps due to technical issues) |
| Actions | 14 actions (idle, approach, retreat, lift, place, hold, stir, pour, cut, drink, wipe, hammer, saw, and screw) |
| Objects | 12 objects (cup, bowl, whisk, bottle, banana, cutting board, knife, sponge, hammer, saw, wood, and screwdriver) |
| Annotations | Actions fully labelled for both hands individually; 5 413 frames labelled with object bounding boxes |
Cite
If you use the KIT Bimanual Actions Dataset, please consider citing our corresponding work.
@article{dreher2020learning,
author = {Dreher, Christian R. G. and Wächter, Mirko and Asfour, Tamim},
title = {Learning Object-Action Relations from Bimanual Human Demonstration Using Graph Networks},
journal = {IEEE Robotics and Automation Letters (RA-L)},
year = {2020},
number = {1},
pages = {187--194},
volume = {5},
doi = {10.1109/LRA.2019.2949221},
}
Data Download
In the following sections you can download the RGB-D dataset, derived data, Yolo files, and relevant documents. Clicking the icon will redirect you to the relevant part in the information page for an overview on the corresponding data format or other relevant information.
Bimanual Actions RGB-D Dataset
The RGB-D dataset split on individual subjects and annotations.
| File | Updated | Size | SHA256 hash |
|---|---|---|---|
| RGB-D videos part 1/6 (subject 1) | 03 Jan 2020 | 13.8 GiB | 57139511f25ecefcba6499ef0969cea3f29ead09fff8cfaad98a1c6e5063298c |
| RGB-D videos part 2/6 (subject 2) | 03 Jan 2020 | 12.3 GiB | b64fb15cb9ea23ae3d7968379fe71ea07dcf29244be4806af222143667a666c9 |
| RGB-D videos part 3/6 (subject 3) | 03 Jan 2020 | 17.9 GiB | f51124c21fa05ac459560e43758cf8fcb42ba2db00bb086f851533fac2613c51 |
| RGB-D videos part 4/6 (subject 4) | 03 Jan 2020 | 15.7 GiB | a4e3ecfbdd090015fa7f99c4da155ed8cd6efdb5d0486c400cc7aaf159c88425 |
| RGB-D videos part 5/6 (subject 5) | 03 Jan 2020 | 14.5 GiB | 60608ee04b45a0d6b26cfdb86577e7bd90d1d65c39569dee1df7b8bea1ebb33f |
| RGB-D videos part 6/6 (subject 6) | 03 Jan 2020 | 19.0 GiB | d9a64213b06e9c914bfcf6ddefed582a4d9c3997561916e5c246120d3d00480b |
| Action ground truth (all subjects, both hands) | 20 Aug 2019 | 206.9 KiB | 0624c16ffe733ad57cea43620545801bba91881ec1e6a10b4118aee37c6ce0e0 |
| Camera normalisation (all recordings) | 20 Aug 2019 | 784.0 B | 1517f25e59caa35df632afaade5584493b5d6e244e263e98313ae880edd3d20a |
Bimanual Actions Dataset, Appendix: Derived Data
Data which was derived from the RGB-D dataset, like human pose or object bounding boxes. Each downloadable file contains the information of all subjects.
| File | Updated | Size | SHA256 hash |
|---|---|---|---|
| 2D human body pose (OpenPose) | 20 Aug 2019 | 267.9 MiB | e0978fb88f94a97ea61826c40e0b4e74f8ec088c5fb0bc8ddade734a2ac3193f |
| 2D human hand pose (OpenPose) | 20 Aug 2019 | 406.2 MiB | 3998cb654e7c38e640ffc035b26dffc44a8cc4bc1a8b15fc0bc4b3afe96dc58e |
| 2D object bounding boxes (Yolo) | 20 Aug 2019 | 174.7 MiB | ccc909149a6b363419a8fa3ef0f984e4cc5181efeb36f9f9c6cb52ed5b0b5414 |
| 3D object bounding boxes | 20 Aug 2019 | 298.2 MiB | c4218502a10550888c1d864e8055fa675e5362f3f1f0d81f3e4f251f4a0cdf92 |
| 3D spatial relations | 20 Aug 2019 | 160.2 MiB | 621fef3a0d310c7279ac33c4eb70d1ae1b446a7bc9a2fc18bd28d19b05098fed |
Bimanual Actions Dataset, Appendix: Yolo Model
Data related to Yolo as object detection framework. To label of the dataset, Yolo_mark was used.
| File | Updated | Size | SHA256 hash |
|---|---|---|---|
| Object detection dataset (images & ground truth) | 20 Aug 2019 | 679.0 MiB | a5e4f2f6918edfbbda7c30e1c719678223fc5c83c3938344cc4f15ea95cc379f |
| Yolo environment for training (includes dataset) | 03 Jan 2020 | 823.4 MiB | 24ce83b898a61cbc5d523db3a64fa154a3249c14824844467160d59b8f5c5d75 |
| Yolo environment for execution (weightfile and network conf. only) | 03 Jan 2020 | 219.2 MiB | 1835cfdaf352931ed335301caaf4bb573515ba77a91e87811f3392e671539877 |
Documents
Relevant documents for this dataset.
| File | Updated | Size | SHA256 hash |
|---|---|---|---|
| Original briefing document | 20 Aug 2019 | 83.6 KiB | 44296b1c45b09b647b3c72c12f03dee590e39325cf17a5ca213c137d4f34d200 |
Information
This page provides general information and a detailed overview on the used data formats in the Bimanual Actions Dataset. A manual for the used data formats is also available for download as a PDF document here.
Action Label Mapping
Refer to the following table for a mapping of action label IDs and their symbolic name.
| # | Action | Description |
|---|---|---|
| 0 | idle | The hand does nothing semantically meaningful |
| 1 | approach | The hand approaches an object which is going to be relevant |
| 2 | retreat | The hand retreats from an object after interacting with it |
| 3 | lift | The hand lifts an object to allow using it |
| 4 | place | The hand places an object after using it |
| 5 | hold | The hand holds an object to ease using it with the other |
| 6 | pour | The hand pours something from the grasped object |
| 7 | cut | The hand cuts something with the grasped object |
| 8 | hammer | The hand hammers something with the grasped object |
| 9 | saw | The hand saws something with the grasped object |
| 10 | stir | The hand stirs something with the grasped object |
| 11 | screw | The hand screws something with the grasped object |
| 12 | drink | The hand is used to drink with the grasped object |
| 13 | wipe | The hand wipes something with the grasped object |
Object Class Label Mapping
Refer to the following table for a mapping of object class label IDs and their symbolic name.
| # | Object | Description |
|---|---|---|
| 0 | bowl | Either a small green bowl or a bigger orange bowl. Used only in the kitchen |
| 1 | knife | A black knife. Used only in the kitchen |
| 2 | screwdriver | A screwdriver. Used only in the workshop |
| 3 | cutting board | A wooden cutting board. Used only in the kitchen |
| 4 | whisk | A whisk. Used only in the kitchen |
| 5 | hammer | A hammer. Used only in the workshop |
| 6 | bottle | Either a white bottle, a smaller black bottle, or a green bottle. Used only in the kitchen |
| 7 | cup | Either a yellow, blue or red cup. Used only in the kitchen |
| 8 | banana | A banana. Used only in the kitchen |
| 9 | cereals | A pack of cereals. Used only in the kitchen |
| 10 | sponge | Either a big yellow sponge, or a smaller green one. Used only in the kitchen |
| 11 | wood | A piece of wood. Either a long one, or a smaller one. Used only in the workshop |
| 12 | saw | A saw. Used only in the workshop |
| 13 | hard drive | A hard drive. Used only in the workshop |
| 14 | left hand | The subject's left hand |
| 15 | right hand | The subject's right hand |
Object Relations Label Mapping
Refer to the following table for a mapping of object relation IDs to their symbolic name.
| # | Relation | Description |
|---|---|---|
| 0 | contact | Spatial relation. Objects are in contact |
| 1 | above | Spatial relation (static). One object is above the other |
| 2 | below | Spatial relation (static). One object is below the other |
| 3 | left of | Spatial relation (static). One object is left of the other |
| 4 | right of | Spatial relation (static). One object is right of the other |
| 5 | behind of | Spatial relation (static). One object is behind of the other |
| 6 | in front of | Spatial relation (static). One object is in front of the other |
| 7 | inside | Spatial relation (static). One object is inside of another |
| 8 | surround | Spatial relation (static). One object is surrounded by another |
| 9 | moving together | Spatial relation (dynamic). Two objects are in contact and move together |
| 10 | halting together | Spatial relation (dynamic). Two objects are in contact but do not move |
| 11 | fixed moving together | Spatial relation (dynamic). Two objects are in contact and only one moves |
| 12 | getting close | Spatial relation (dynamic). Two objects are not in contact and move towards each other |
| 13 | moving apart | Spatial relation (dynamic). Two objects are not in contact and move apart from each other |
| 14 | stable | Spatial relation (dynamic). Two objects are not in contact and their distance stays the same |
| 15 | temporal | Temporal relation. Connects observations of one object instance over consecutive frames |
RGB-D Camera Normalisation
The camera angles vary slightly, depending on when the recordings were taken. The file
bimacs_rgbd_data_cam_norm.json contains the necessary data to perform a normalisation, i.e. to rotate the
point clouds to account for the tilted camera, and offsets to center the world frame on the table.
The normalisations are stored in a JSON file, where key indices are stored in an integer array
key_indices. These key indices denote, at which recording numbers the camera parameters have changed. The
corresponding parameters can be obtained by looking for the next biggest key index for any given recording number, to
then look up that index in the map. For example, for recording number 42, the parameters of key index 90
would be the correct ones. The index 0 is just a dummy to ease automatic processing.
The X-axis of the point cloud is rotated by the negative angle in angle. The offsets
offset_rl (right/left), offset_h (height) and offset_d (depth) center the world
frame on the table. The angle is in degree, all offsets are in millimeters.
RGB-D Video Format
The RGB and depth videos were recorded with a PrimeSense Carmine 1.09 and divided into separate folders, namely
rgb and depth. The recordings are organised in subfolders. The first level of folders
contain all recordings of a specific subject (i.e. subject_x), the second a specific task (e.g.
task_4_k_wiping or task_9_w_sawing), and the third a specific take or repetition (i.e.
take_x).
Each recording is a folder which contains a file metadata.csv and one or more chunk folders
chunk_x. These chunks, in turn, contain a certain amount of frames (image files) from the recording. The
metadata.csv file contains several variables relevant for the recording and may look like this:
name,type,value
fps,unsigned int,30
framesPerChunk,unsigned int,100
frameCount,unsigned int,427
frameWidth,unsigned int,640
frameHeight,unsigned int,480
extension,string,.pngThe first column denotes the variable name, the second the type of the variable, and the third the value of
the variable. The variable fps denotes the frame rate for the recording, while frameWidth
and frameHeight denote the resolution of the recording, and frameCount the amount of frames.
The extension of the image files is encoded into extension. Because the image frames are chunked, it is
also important to know the amount of frames per chunk. This is stored in framesPerChunk.
For this dataset, the variables extension, framesPerChunk, frameWidth and
frameHeight can be assumed constant, as the frame dimensions did not change and the other parameters
were not changed during recording.
Action Ground Truth
This data format is used in Action ground truth. For each recording, there is a JSON file containing the action segmentation for both hands. Let's consider a simple example segmentation for a recording with 1015 frames:
{
"right_hand": [0, 0, 1015],
"left_hand": [0, 0, 1015]
}For each hand, there is an array of elements, and the length of the array is always odd. All even elements are
always integer values and depict key frames. All odd elements are either integer or null, and depict
the action label ID (if integer), or that no action is associated (if null).
The example above therefore translates to: "For both hands, there is an action segment with the ID '0' beginning from frame 0 and ending before frame 1015" ('0' is the action label ID of 'idle'). A graphical representation with action label IDs substituted with the actual action labels would look like this:
Frame number: 0 ... 1015
| |
Right hand: [ idle )[
Left hand: [ idle )[Now let's consider that the right hand begins holding (the action label ID of 'hold' is '5') an object at frame 500. This would change the previous example to:
{
"right_hand": [0, 0, 500, 5, 1015],
"left_hand": [0, 0, 1015]
}Or graphically:
Frame number: 0 ... 500 ... 1015
| | |
Right hand: [ idle )[ hold )[
Left hand: [ idle )[2D Human Body Pose Data
The human body pose data is organised in subfolders. The first level of folders contain all pose data of a specific
subject (i.e. subject_x), the second a specific task (e.g. task_4_k_wiping or
task_9_w_sawing), and the third a specific take or repetition (i.e.
take_x). The pose data for an individual frame is saved in a corresponding JSON file in the
folder body_pose.
The root element of each JSON file is a list with one element, which is an object. The properties of this object
are again objects, which encode the confidence, the label (e.g. RAnkle or Neck), and the
coordinates in pixels of a given key point of the pose. If the confidence is 0.0, that pose key point
was not found in the image.
2D Human Hand Pose Data
The human hand pose data is organised in subfolders. The first level of folders contain all pose data of a specific
subject (i.e. subject_x), the second a specific task (e.g. task_4_k_wiping or
task_9_w_sawing), and the third a specific take or repetition (i.e.
take_x). The pose data for an individual frame is saved in a corresponding JSON file in the
folder hand_pose.
The root element of each JSON file is a list with one element, which is an object. The properties of this object
are again objects, which encode the confidence, the label (e.g. LHand_15 or RHand_4), and
the coordinates relative to the image width and height of a given key point of the pose. If the confidence is
0.0, that pose key point was not found in the image.
2D Object Bounding Boxes
The 2D object bounding box data is organised in subfolders. The first level of folders contain all pose data of a
specific subject (i.e. subject_x), the second a specific task (e.g. task_4_k_wiping or
task_9_w_sawing), and the third a specific take or repetition (i.e.
take_x). The 2D object bounding box data for an individual frame is saved in a corresponding JSON file
in the folder 2d_objects.
The root element of each JSON file is a list of JSON objects, and each JSON object represents the bounding box of a detected object. Such an object looks like this:
{
"bounding_box": {
"h": 0.22833597660064697,
"w": 0.07694989442825317,
"x": 0.7088799476623535,
"y": 0.6917555928230286
},
"candidates": [
{
"certainty": 0.9995384812355042,
"class_name": "cereals",
"colour": [
0,
255,
111
]
}
],
"class_count": 16,
"object_name": ""
}The property bounding_box denotes the bounding box, with x and y being the
coordinates of the center of the bounding box, and w and h its width and height,
respectively. These values are relative to the input image's height and width.
Sometimes there are several object class candidates for a detected object, but most of the times it is
only one. The candidates are listed in the candidates property. Here, the property
class_name stores the possible object class candidate for that bounding box,
and the property certainty the certainty as estimated by
Yolo. The property colour encodes an RGB colour unique to
the given class ID for visualisation purposes.
class_index
property, as this is the raw class ID of YOLO and might not correspond to the definition above.The total number of classes is stored in the class_count property.
3D Object Bounding Boxes
The 3D object bounding box data is organised in subfolders. The first level of folders contain all pose data of a
specific subject (i.e. subject_x), the second a specific task (e.g. task_4_k_wiping or
task_9_w_sawing), and the third a specific take or repetition (i.e.
take_x). The 3D object bounding box data for an individual frame is saved in a corresponding JSON file
in the folder 3d_objects.
The root element of each JSON file is a list of JSON objects, and each JSON object represents the bounding box of a detected object. Such an object looks like this:
{
"bounding_box": {
"x0": -78.30904388427734,
"x1": 36.15547561645508,
"y0": -789.953125,
"y1": -749.12744140625,
"z0": -1120.7742919921875,
"z1": -976.8253784179688
},
"certainty": 0.9998389482498169,
"class_name": "banana",
"colour": [
0,
255,
31
],
"instance_name": "banana_2",
"past_bounding_box": {
"x0": -78.34809112548828,
"x1": 36.506187438964844,
"y0": -789.953125,
"y1": -749.7930908203125,
"z0": -1120.77294921875,
"z1": -976.9805297851563
}
}The extents of the 3D bounding box are defined in the bounding_box property, where
x0, x1, y0, y1, z0, and z1
denote the minimum and maximum extents for the x, y, and z axis respectively. Similarly, the property
past_bounding_box contains the bounding box of the same object 333 ms in the past, which allows
to compute dynamic spatial relations (cf. [1]).
The properties certainty, class_name, and colour
were assumed from the 2D bounding boxes.
The property instance_name holds an unique identifier for the recording to make sure that the same
object can be tracked across several frames.
class_index
property, as this is the raw class ID of YOLO and might not correspond to the definition above.Note: It is possible that the instance name suggests a
different class name than denoted by the class_name property. This is not a
bug, but a result of allowing candidates for each bounding box in the 2D object detection.
The reason for this is that, whenever a new object is detected, it will be assigned a globally unique identifier consisting of the most probable class and a unique number. If if later turns out that the actual class is most likely another one, the assigned class may change, however, to ensure that objects remain trackable, an assigned identifier will never change.
3D Spatial Relations
The spatial relations data is organised in subfolders. The first level of folders contain all pose data of a
specific subject (i.e. subject_x), the second a specific task (e.g. task_4_k_wiping or
task_9_w_sawing), and the third a specific take or repetition (i.e.
take_x). The spatial relations data for an individual frame is saved in a corresponding JSON file
in the folder spatial_relations.
The root element of each JSON file is a list of JSON objects, and each JSON object represents one spatial relation between a pair of objects. Such an object looks like this:
{
"object_index": 0,
"relation_name": "behind of",
"subject_index": 1
}The properties object_index and subject_index are the respective object and subject of a relation, for example: "The bowl (object) is behind of the
cup (subject)".
The property relation_name is the label of the relation, in plain text.
The list of relations is explicit. That is, if there are any implicit relations, they will be in that list as well.
Object Detection Data
The file bimacs_object_detection_data.zip is structured like this:
bimacs_object_detection_data/
|- images/
| `- *.jpg
|
|- labels/
| `- *.txt
|
|- images_index.txt
|- labels_index.txt
`- object_class_names.txt
The folder images/ contains all training images in the dataset, and the corresponding ground truth can
be found in the labels/ folder. The ground truth files have the same filename as the image in the
dataset, just the file extension differs. The files images_index.txt and labels_index.txt
contain a list of all files inside the images/ and labels/ folders respectively.
The file format for the ground truth is the format Darknet uses. Each ground truth bounding box is denoted in a line as a 5-tuple separated by white spaces:
<object class ID> <box center X> <box center Y> <box width> <box height>The object class name corresponding to the ID can be found in object_class_names.txt. Please note that
this file contains two unsued object classes (unused1 and unused2). You can safely ignore
them. The extents of the bounding box, given by the coordinates of the center of the bounding box and its width and
height are relative to the image width and height. That is, these values should range from 0 to 1.
Yolo Training Environment
The file bimacs_yolo_train_setup.zip contains the training environment to be used with
Yolo together with the object detection dataset and is structured
like this:
bimacs_object_detection_data/
|- images/
| `- *.jpg
|
|- labels/
| `- *.txt
|
|- weightfiles/
| `- darknet53.conv.74
|
|- images_index.txt
|- labels_index.txt
|- object_class_names.txt
|- net.cfg
|- train_start.sh
`- train_resume.sh
The folder images/ contains all training images in the dataset, and the corresponding ground truth can
be found in the labels/ folder. The ground truth files have the same filename as the image in the
dataset, just the file extension differs. The files images_index.txt and labels_index.txt
contain a list of all files inside the images/ and labels/ folders respectively.
The file weightfiles/darknet53.conv.74 is a pre-trained weights file supplied by
pjreddie.com (Joseph Redmon's homepage).
The file train_setup.cfg contains the setup for the training for
Yolo, while the file net.cfg is a configuration of the
used network architecture within Darknet.
There are also 2 script files provided, namely train_start.sh to easily start the training, and
train_resume.sh to resume the training (loading a backup).
The object class name corresponding to the ID can be found in object_class_names.txt. Please note that
this file contains two unsued object classes (unused1 and unused2). You can safely ignore
them.
To use this training setup, extract the zip file and move the folder bimacs_object_detection_data
into the root folder of your Darknet installation. Then, in the root of your Darknet installation, run
./bimacs_object_detection_data/train_start.sh to begin training. Backup and milestone weight files of the
training will be written into the folder ./bimacs_object_detection_data/backup/. To resume the training,
run ./bimacs_object_detection_data/train_resume.sh
Yolo Execution Environment
The file bimacs_yolo_run_setup.zip contains the runtime environment to be used with
Yolo and is structured like this:
bimacs_object_detection_data/
|- weightfiles/
| `- net_120000.weights
|
|- object_class_names.txt
`- net.cfg
The file weightfiles/net_120000.weights is the weight file pre-trained on the objects used in the
dataset.
The file net.cfg is the configuration of the used network architecture within Darknet.
The object class name corresponding to the ID can be found in object_class_names.txt. Please note that
this file contains two unsued object classes (unused1 and unused2). You can safely ignore
them.